We have a great community of users who have all gone through the process of setting up and learning how to use our products. We have tried to capture some of the more frequent questions that we get from them on this page. Please look this list over to see if your question is answered here and, if not, please e-mail us at info [at] dynomotion.com. Also send us an e-mail if you think a question needs to be addressed on this page. We are always looking for better ways to get our customers up and running.
Yes. Most all features are supported. Coordinated motion, Jogging, Homing, Spindle control, Encoder Feedback, Probing, Threading, Tool Changing, Backlash, and more. See here.
Why won't Mach3 Reset Clear?
A common User mistake is to have the Mach3 EStop input configured to something that is active or toggling. Mach3 does not allow you to disable the EStop input. If you don't have an EStop input set it to something unused and in-active: ie KFLOP LED Port1 Pin 46 Active Low.
See Mach3 | Config | Ports&Pins | Inputs | EStop
Is all Dynomotion Software Free?
Yes. Including our KMotionCNC Application for running GCode. Download it here.
Will the GCode Interpreter run stand-alone?
No. The RS274 GCode Interpreter and Trajectory Planner executes on the PC and sends Coordinated Motion commands to the KFLOP Board.
Can I connect both Kanalog and KStep to a KFLOP?
Kanalog and KStep are both designed to connect to KFLOP's JP7 connector. Kanalog absolutely requires to be connected to KFLOP JP7. KStep can be made to use the Step and Direction signals from KFLOP's JP5 (RJ45) by disconnecting JP5 from Kanalog. The overall result is:
Everything on Kanalog will still work except Kanalog JP2 differential inputs.
KStep +5V Power, GND, and Enable will need to be externally wired to KStep J6
KStep's Extra I/O on KStep JP33 wil not be available.
Can I still use 3rd party Step/Direction Drives when using KFLOP and Kanalog? Which 3rd party Servo Drives are recommended?
Yes: 3rd party Step/Direction Drives can make use of Step and Direction signals from KFLOP's JP5 (RJ45) by disconnecting JP5 from Kanalog. Everything on Kanalog will still work except Kanalog JP2 differential inputs.
There is also another option. The 4 Step/Direction signals that normally output on KFLOP JP7 can be multiplexed to come out KFLOP JP4 and JP6 (2 each). There is a limitation. Because KFLOP JP4 and JP6 each only have 2 I/O pins without 150 ohm pull down resistors, only one Step/Direction Generator on each connector can be used in Open Collector mode to drive +5V optos. For more information see: http://dynomotion.com/Help/StepAndDirection/StepAndDir.htm
In terms of 3rd Party Servo Drives. Many users of our products have had success in pairing KFLOP and Kanalog with Servo Drives from ADVANCED Motion Control Systems. You can learn more about their products here:
Do I need to be a C Programmer to use your Controller?
Yes. Certain operations such as Controller initialization and Homing involve User C Programs that Execute in KFLOP/Kogna. So some modification of C Programs is required. We do this because it is the most powerful and flexible approach. It isn't necessary to be a C expert, but basic programming knowledge is helpful. Download the software and go to the C Programs Screen to get an idea the level of difficulty.
What is the difference between Pulse Width Modulation (PWM) and Step Pulse and Direction?
PWM is a pulse at a fixed frequency where the pulse length varies to provide various duty cycles (0 to 100% on time).
PWMs are used when we want to control something from 0 to 100% like Lamp Intensity, Motor torque, Motor Speed, Heat, etc... and cannot really be used to control a position except in some cases where commanding a position from, for example, 0 to 1 inch with an accuracy of 1% might be acceptable.
Step Pulses are fixed period pulses that occur at varying frequency.
Step Pulses are usually used to specify a delta distance to move for each pulse and are usually accumulated (counted) to determine a position with high accuracy. However controlling something like constant velocity can be controlled by just outputting a constant frequency.
Both PWM and Step Pulses may have a separate direction signal if direction of control is necessary.
Why does my Servo "Run Away" as soon as it is enabled?
You may have positive feedback instead of negative feedback. This causes any error to get bigger and bigger rather than smaller and smaller.
You can change positive to negative feedback by reversing anything in the axis. The simplest thing to reverse is the OutputGain.
How can I change my Axis to move in the other direction?
For an open loop system you can change the sign of your OutputGain (ie from 1.0 to -1.0)
For a Closed Loop System you must also change the sign of the InputGain0 otherwise the loop will have positive feedback instead of negative feedback (runaway).
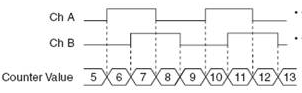
What Type of Encoders work with KFLOP/Kogna?
There are encoders with digital outputs (quadrature square waves) and encoders with analog outputs (sine/cosine waves). KFLOP/Kogna only accept digital signals.
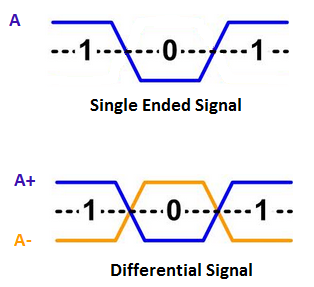
There are also two different types of digital signals. Single ended and Differential.
Single ended are sometimes referred to as TTL. Single ended have only two signals A and B (plus power and ground and possibly an Index pulse). The A and B signals are referenced to GND (more than 2.8V is high and less than 0.4V is low).
Differential signals have 4 signals called A+ A- B+ B-. This method is much better because there is basically no reference to any ground and so any noise or differences between grounds have no effect. When the A+ signal is at a more positive voltage relative to the A- signal the value is considered high, when the A+ signal is at a more negative voltage relative to the A- signal the value is considered low. The Difference only needs to be ~ 0.2V to be interpreted correctly but the + and - signals are usually driven by a Line Driver device that provides 2~4V of difference. If "twisted pair" cables are used then noise immunity is even better because any noise picked up in the cable is likely to be picked up exactly the same in both the + and - signals and so will not change their relative difference.
KFLOP by itself only accepts single ended signals. Our Kogna, Kanalog, and SnapAmp boards have differential encoder inputs. 3rd party modules are available to convert between single ended and differential.
My Encoders are counting inconsistently. What could be wrong?
Some encoder inputs are differential (ie. Kanalog and SnapAmp encoder inputs). They have + and - inputs and look for the relative voltage to swing positive and negative. For example (+) might be +4V and (-) +0.4V (+3.6V difference). In the other state (+) might be +0.4V and (-) +4V (-3.6V difference).
Single ended encoders with only one (signal each for A and B) can NOT be connected by just grounding or leaving the other input floating.
Single ended encoders can be connected to the single ended inputs on KFLOP/Kogna or low cost adapter cables can be purchased (USDigital.com) to convert single ended signals to differential signals.
Can I Modify the KMotionCNC Screens besides the several provided?
Where are the Prices listed? How do I order? How much is shipping?
Order from our Purchase Page using Credit Card or PayPal.
If you would like to use Bitcoin as form of payment, please send us an email to sales [at] dynomotion.com. We charge a flat rate of $20 domestic or $65 International for all shipments regardless of size. International orders may be subject to duty or import taxes so please do your research to know what other expenses you may need to pay for imports.
Windows will not install the driver, ie Bad Hash. How can I get the driver to install?
Digitally Signed USB Drivers are now available. They can be downloaded here.